Sicherheit immer an Bord?
Mit KÜS DRIVE Kurs nehmen auf die Prüfung von Fahrerassistenzsystemen für mehr Verkehrssicherheit

Prüfung von fehlerhaft arbeitenden automatisierten Fahrfunktionen, die durch Degradation, Manipulation und unsachgemäße Reparatur verursacht werden.
Wie sieht die Zukunft der Hauptuntersuchung für automatisierte, vernetzte und autonome Fahrzeuge aus?
Dieser Frage ist die KÜS nachgegangen und lotet mit ihrem Forschungs- und Entwicklungsprojekt KÜS DRIVE die Grenzen des Machbaren aus.
Sie sehen gerade einen Platzhalterinhalt von YouTube. Um auf den eigentlichen Inhalt zuzugreifen, klicken Sie auf die Schaltfläche unten. Bitte beachten Sie, dass dabei Daten an Drittanbieter weitergegeben werden.
Mehr InformationenArbeiten Fahrerassistenzsysteme moderner Fahrzeuge im Langzeitbetrieb immer verlässlich?
Fahrerassistenzsysteme (ADAS) bringen mehr Verkehrssicherheit, jedoch ist die Betrachtung über die gesamte Lebensdauer erforderlich. Spezielle Prüfungen der ADAS sollen als Teil der regelmäßigen HU sicherstellen, dass Funktionseinschränkungen durch Verschleiß, unsachgemäße Reparaturen oder Beschädigungen rechtzeitig erkannt werden und Fahrzeuge in einem sicheren Zustand bleiben.
Das Szenario
Aufgrund der rasanten technischen Weiterentwicklung der Fahrzeuge, die insbesondere durch integrierte ADAS (Advanced Driver Assistance Systems) gekennzeichnet ist, müssen auch die Prüfinhalte der periodischen Hauptuntersuchung mit dieser Entwicklung mithalten, um weiterhin maximale Verkehrssicherheit zu gewährleisten.
Längst überwachen Kamerasensoren die Einhaltung der Fahrspur und machen beim Überfahren der Seitenlinien den Fahrer aufmerksam. Und falls sich das Auto vorausfahrenden Verkehrsteilnehmern gefährlich nähert, greift der Notbremsassistent ein. Vernetzte Kommunikation innerhalb der Verkehrsteilnehmer, aber auch mit der Verkehrsinfrastruktur wird sicherheitsrelevante Vorteile bringen.
Die Aufgabe
Automatisierte Fahrfunktionen wie der ab 2024 vorgeschriebene Notbremsassistent AEBS (Automated Emergency Brake System) sollen auf korrekte Funktion hin überprüft werden. Wird z. B. eine Vollbremsung bei hoher Geschwindigkeit auf der Überholspur der Autobahn ausgelöst, kann diese fehlerhafte Funktion Auffahrunfälle verursachen. Dasselbe gilt auch für die klassischen DAS (Driver Assistance Systems) wie ABS und ESP, die bei Fehlfunktionen zu Unfällen führen können.
Zur Kontrolle und Sicherstellung der korrekten Funktion über den gesamten Lebenszyklus des Kraftfahrzeuges entwickelt die KÜS ein dynamisches Prüfverfahren. Dieses Verfahren reicht über die gesamte Wirkkette der ADAS – von den Umfeld-Sensoren über die Auswertungs- und Steuerungseinheit bis hin zu den Aktoren.
Chancen vs. Risiken

Unfallvermeidung durch korrekte Funktion
Der Notbremsassistent vermeidet in den Fällen eines plötzlich auftauchenden Hindernisses oder der verminderten Aufmerksamkeit des Fahrers durch eine automatische Vollbremsung einen Aufprall oder reduziert die Folgen eines Aufprallunfalls.

Unfallgefahr durch Fehlfunktion
Eine Fehlfunktion des Notbremsassistenten führt zu einer für den nachfolgenden Verkehr nicht nachvollziehbaren Vollbremsung und damit zu möglichen Auffahrunfällen.
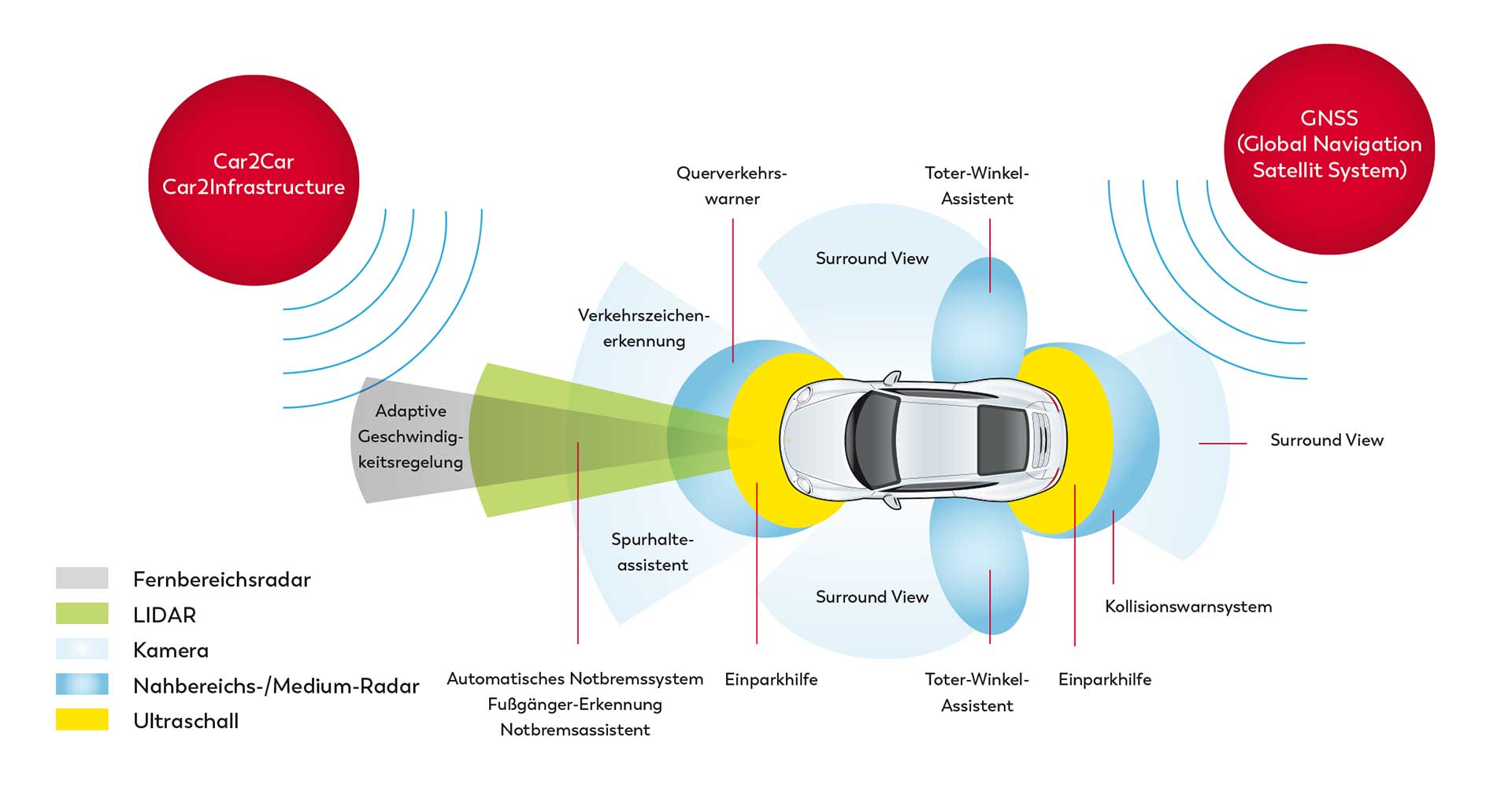
Automatisierte Fahrfunktionen
Assistenzsysteme (ADAS)
- Adaptive Geschwindigkeitsregelung (ACC)
- Spurhalteassistent (LKA)
- Verkehrszeichenerkennung mit Intelligent-Speed-Adaption (ISA)
- Totwinkelwarner (BSW)
- Adaptive Cruise Control (ACC)
- Automatisches Notbremssystem (AEBS)
- Adaptives Licht (AFS)
Technische Anforderungen
- Prüfung von fahrfertigen bzw. von zugelassenen Fahrzeugen ohne Adaptionsaufwände wie z. B. Fixierung
- Auf nationale Normale rückführbare, reproduzierbare Messergebnisse der Wirkprüfungen.
- Prüfung in einer Halle mit optimierten Flächenbedarf, d. h. unabhängig von Witterungsbedingungen.
- Dynamische, frei editierbare, szenarienbasierte Wirkprüfungen mit Geschwindigkeiten über 60 km/h.
- Durchführung via OTA (Over the Air) Stimulation, d.h. ohne ADAS Steuergerätekommunikation.
- Hohe Automatisierung der Wirkprüfung zur Taktzeitminimierung.
Technische Problemlösung
Sicher über den gesamten Fahrzeuglebenszyklus
Automatisierte Fahrzeuge sind in der Lage, ihre Umgebung zu erkennen und teilautonom zu fahren. Doch wie kann die Funktionssicherheit dieser Fahrzeugkomponenten über den gesamten Fahrzeuglebenszyklus hinaus gewährleistet werden?




Szenarienbasierte Wirk-Prinzip-Prüfungen nach dem OTA-Verfahren
Die Umfeldsensoren eines Fahrzeugs werden kontaktlos und ohne Zugriff auf die relevanten ADAS-Steuergeräte stimuliert. Die Wirk-Prinzip-Prüftechnik prüft die Reaktion eines technischen Gesamtsystems auf eine bekannte definierte Anregung und bewertet die Differenz der Reaktion des Systems mit der Sollreaktion. Bei der Wirkprüfung von Fahrerassistenzsystemen bedeutet dies, dass die Anregung über die Sensorik wie auf der Straße physikalisch (Over the Air) unmittelbar erfolgt. Somit wird ein direkter Zugriff auf die Steuergeräte vermieden, was die Überprüfung der gesamten Wirkungskette ermöglicht.
Tests mit kontaktloser Stimulation der Sensoren mit physikalischen Eingangsgrößen wie Video, Radar, Lidar, Ultraschall oder Lichtwellen wird als Over the Air (OTA)-Test bezeichnet.
OTA-Stimulation der Fahrzeugsensoren
Für valide und reproduzierbare Ergebnisse kommt die Vehicle-in-the-Loop (VIL)-Simulationsmethode zum Einsatz, bei der ein reales Fahrzeug in einer virtuellen Umgebung getestet wird. Diese Form der Absicherung kann nicht nur in regelmäßigen Hauptuntersuchungen (Periodic Technical Inspections, PTI) eingesetzt werden, sondern auch bei End-of-Line-Tests in der Automobilproduktion und im R&D-Bereich.
Das Fahrzeug befindet sich beim VIL-Test auf dem lenkbaren Funktionsprüfstand SFT (Steerable Function Tester) – Dürr-Markenname „x-road curve“ – und ist in der Lage, nach jeweiligem abzufahrendem Prüfszenario durch den Fahrer angesteuert zu beschleunigen, zu bremsen oder nach rechts und links zu lenken.
Aufgrund der technischen Eigenschaften des Rollenprüfstands bleibt das Fahrzeug immer zur Symmetrieachse des Prüfstands in Längsrichtung positioniert und kann mit Geschwindigkeiten bis 130 km/h gefahren werden.
Mit Hilfe der Software-Schnittstelle zwischen dem lenkbaren Rollenprüfstand und der dSPACE Toolchain ist es möglich, die realen physischen Bewegungen des Fahrzeugs an einen Digital Shadow zu übertragen. Dieser wird samt Fahrzeugumgebung auf einem Simulator von dSPACE in Echtzeit berechnet. Die Simulation speist einen Monitor und einen Radarzielsimulator zur OTA-Stimulation der Kamera- und Radarsensoren.
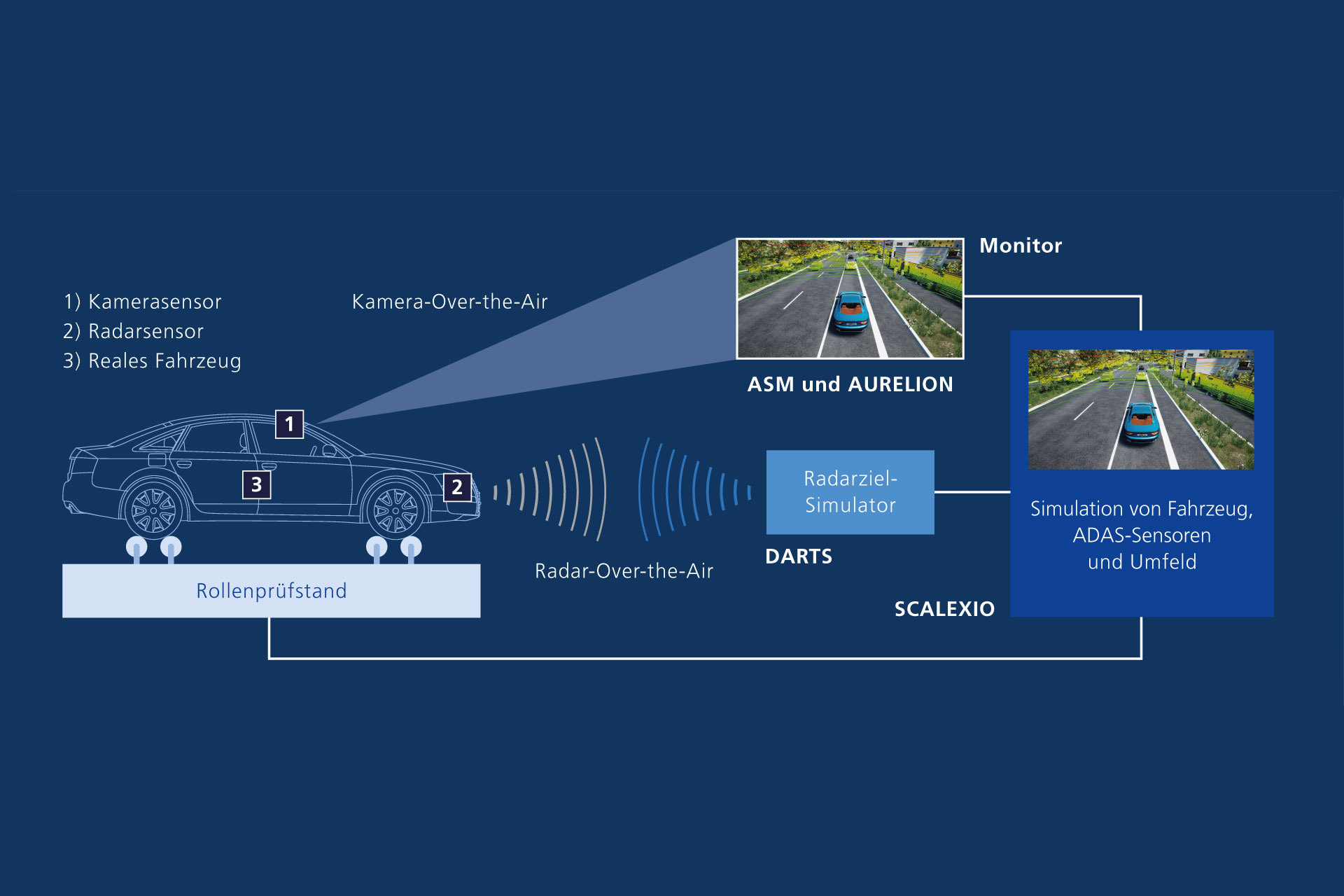


Prüfaufbau der Sensorik
In die Prüflinie sind direkt vor dem zu testenden Fahrzeug ein Monitor und eine Radarantenne integriert, die horizontal und vertikal positionierbar sind. Der Monitor stimuliert die Kamera des Fahrzeugs mit Umgebungs- und Straßenszenarien, die von der sensorrealistischen Simulationslösung AURELION in Form einer 3D-Welt animiert wird. Dies dient der Überprüfung, ob der Kamerasensor des VUT (Vehicle-under-Test) die relevanten Objekte richtig erkennt. Die korrekte Funktion des Spurhalteassistenten (LKAS) und des Spurhaltewarnsystemassistenten (LDWS) oder auch der Verkehrszeichenerkennung mit Intelligent-Speed-Adaption (ISA) wird mit realistischen Straßendarstellungen getestet.
Prüfumfänge von KÜS DRIVE

- dynamische Bremsprüfung gleichzeitig an zwei Achsen
- dynamische Wirkprüfung von ABS, ESP, ASR (Einleiten von Kräften/Geschwindigkeiten pro Rad)
- dynamische Wirkprüfung von ADAS, d. h. ISA, AEBS, LDW, LKA, ACC
- dynamische Wirkprüfung der Einstellung von adaptiven Lichtsystemen (AFS)
- Prüfung ADAS bis hin zum automatisierten/vernetzten/autonomen Kfz
Die KÜS erstellt mit ihrer Hard- und Software sowie ihrem Know-how in der Anwendung aus den unterschiedlichen Komponenten KÜS DRIVE als leistungs- und zukunftsfähiges Gesamtkonzept.
Anwendungsbeispiele
Prüfung der adaptiven Lichtsysteme (AFS)
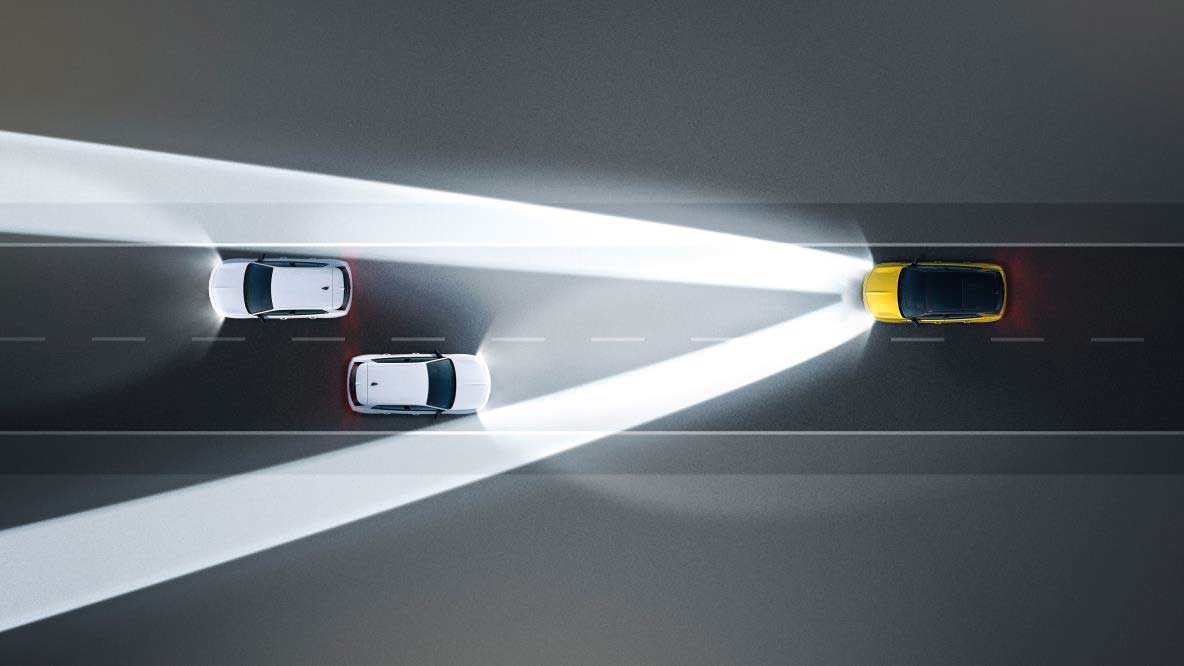
Funktionsweise
Das Fahrzeug fährt in der Nacht mit Geschwindigkeiten über 60 km/h, detektiert mit seiner Kamera entgegenkommende und vorausfahrende Fahrzeuge und blendet diese im potenziellen Blendbereich bei eingeschalteten Fernlicht seitlich aus (siehe nebenstehendes Bild).
Prüfvoraussetzung
Bei abgedunkelter Halle und mit eingeschalteten Abblendlicht fährt das Fahrzeug auf dem SFT mit Geschwindigkeiten über 60 km/h. Auf einer 10-m-Wand bildet sich die Struktur des Fahrzeuglichtes ab.

Prüfmethode 1 – mittels Umfeldsimulation
Die Umfeldsimulation zeigt der Fahrzeugkamera eine Nachtszene mit einem entgegenkommenden oder vorausfahrenden beleuchteten Fahrzeug. Auf der 10-m-Wand wird mittels grüner Laser die Position und Kontur dieses Fahrzeugs aus der Lage in der Umfeldsimulation dargestellt. Die korrekte Funktion des AFS wird dem Prüfer auf der 10m Wand gezeigt, wenn das adaptive Fernlicht eingeschaltet und die grüne Kontur des entgegenkommenden oder vorausfahrenden Fahrzeug vollständig in dem dunklen Bereich liegt (siehe nebenstehendes Bild).

Prüfmethode 2 – mittels LED-Leuchten
Zwei LED-Leuchten sind in definierten Positionen vor der 10-m-Wand aufgebaut und können mit weißem oder rotem Licht angesteuert werden. Damit wird die Beleuchtung eines entgegenkommendes oder vorausfahrendes Fahrzeug simuliert und von der Fahrzeugkamera erfasst. Die korrekte Funktion des AFS wird dem Prüfer auf der 10-m-Wand gezeigt, wenn das adaptive Fernlicht eingeschaltet und die LED Leuchten vollständig im dunklen Bereich liegen (siehe nebenstehendes Bild).
Prüfung des intelligenten Geschwindigkeitsassistenten (ISA)
Funktionsweise

Prüfvoraussetzung
Prüfmethode
Der Zeitpunkt, zu dem die Vorderachse des digitale Abbild des Fahrzeugs in der Umfeldsimulation das Schild passiert, wird mit dem Zeitpunkt verglichen, zu dem das Schild im Cockpit erscheint. Das Prüfkriterium ist die Zeitdifferenz zwischen dem Passieren des Schildes und der korrekten Anzeige desselben im Cockpit.
Siehe auch den nebenstehenden Film.
Detaillierte Beschreibungen von Tests und deren Ergebnisse finden Sie in den nachstehenden Publikationen.
Publikationen
- «Wirkprüfungen dynamischer automatisierter bzw. autonomer sicherheitsrelevanter Fahrfunktionen von Kraftfahrzeugen im Rahmen der regelmäßigen Hauptuntersuchung»
- «ADAS Wirkprüfungen zugelassener Kraftfahrzeuge in einer Prüflinie basierend auf dem ViL-Testkonzept; Motivation, Voraussetzungen und Ergebnisse»
Ergebnisse und Ausblick
Anpassung der Hauptuntersuchungen an automatisierte, vernetzte und autonome Fahrzeuge
Gesetzlich vorgeschriebene Hauptuntersuchungen tragen nicht nur zur Vermeidung von technischen Fehlfunktionen bei, sondern erhöhen auch die Verkehrssicherheit. ADAS-Fahrerassistenzsysteme sind zusätzlich in der Lage, durch menschliches Fehlverhalten oder Unvermögen verursachte Unfälle deutlich zu reduzieren. Um dies zu gewährleisten, müssen diese Systeme jedoch über den gesamten Lebenszyklus des Fahrzeugs fehlerfrei funktionieren. Mögliche Störfaktoren sind dabei:
- Alterung von Material und Komponenten
- Mangelhafte bzw. fehlerhafte Instandsetzung oder Wartung
- Manipulation von Komponenten und Systemen
- Unerlaubtes oder übermäßiges Tuning
- Grenzen der Selbstdiagnose
Das Erkennen von technischen Mängeln und damit die Aufrechterhaltung der Verkehrssicherheit wird u. a. durch die periodische Prüfung sichergestellt.
Zum Beispiel können Abstandsregeltempomaten (ACC) und Notbremsassistenten (AEB) Auffahrunfälle auch bei hohen Geschwindigkeiten verhindern und damit signifikant zur Reduktion der Unfallzahlen beitragen.
Gerade bei diesen Unfällen, bei denen ein fahrendes Fahrzeug mit einem in gleicher Richtung fahrenden oder stehenden Fahrzeug kollidiert, sind neben hohen Sachschäden auch oft Tote und Schwerverletze zu beklagen. Jedoch kann auch eine fehlerhafte Auslösung eines nicht korrekt eingestellten Notbremsassistenten zu Auffahrunfällen führen.
Sicherheitssysteme periodisch prüfen
Die Prüflinie KÜS DRIVE demonstriert bereits heute ein überzeugendes technisches Lösungskonzept für die neuen Anforderungen an die Prüfumfänge bei der regelmäßigen Hauptuntersuchung automatisierter Fahrzeuge. Die Sicherheit von Funktionen für das automatisierte Fahren kann in entsprechend ausgestatteten Prüfzentren über den Lebenszyklus eines Fahrzeugs geprüft und nachgewiesen werden.

Mit KÜS DRIVE arbeiten wir an den Innovationen von morgen, um Lösungen zur verbesserten Fahrzeugsicherheit und zur Funktionssicherheit von Assistenzsystemen und von automatisiertem Fahren über den gesamten Produktlebenszyklus voranzubringen.
Dipl.-Ing. Peter Schuler
Hauptgeschäftsführer der KÜS
Die Zukunft im Blick
Die KÜS erkannte frühzeitig, dass sich rasant weiterentwickelnde und zunehmend automatisierte Fahrzeuge neue Sicherheitsfragen mit sich bringen, die für straßenzugelassene Fahrzeuge gelöst werden müssen. Um mit diesem technologischen Fortschritt im Bereich der Fahrerassistenzsysteme Schritt zu halten, steigen in der Folge die Anforderungen an die gesetzlich geregelte periodische Fahrzeugüberwachung stetig an.